Przemysł okrętowy zastanawia się nad konstrukcją, budową i eksploatacja statków autonomicznych po epoce koronawirusa. Widzimy, że ta epoka odciśnie piętno nie tylko na stylu życia ludzkości, ale również na transporcie morskim i systemach obsługi wydobycia ropy i gazu offshore. Obecnie budowane jednostki są coraz bardziej zautomatyzowane. Statki często są wyposażone w systemy wspomagania decyzji załogi oraz układy diagnostyczne zainstalowanych urządzeń. Coraz więcej systemów zainstalowanych na statkach i jednostkach offshore może pracować bez integracji człowieka. Taka sytuacja w przyszłości doprowadzi do rozwoju i stosowania statków w pełni autonomicznych.
Bezpieczeństwo żeglugi
Budowa i eksploatacja statków autonomicznych będzie miała istotny wpływ na bezpieczeństwo eksploatacji statków, ponieważ badania IMO i ubezpieczycieli wykazują coraz większy wpływ czynnika ludzkiego na awarie urządzeń oraz wypadki na morzu i podczas prac przeładunkowych. Często jest to spowodowane przemęczeniem załóg pływających oraz długim czasem przebywania załogi na morzu z daleka od rodziny i bliskich. Wpływ na ilość wypadków mają również problemy z obsługą bardzo skomplikowanych układów automatyki i niewystarczająca ilość czasu na prowadzenie prac serwisowych na statkach.
Czynnik ludzki
W epoce koronawirusa nie bez znaczenia jest utrudniony proces wymiany załogi oraz konieczność przeprowadzenia testów w celu potwierdzenia przed mustrowaniem, że członek załogi nie jest zainfekowany tą groźną bakterią. Wspomnieć również trzeba o możliwości zarażenia koronawirusem podczas podróży na jednostkę. Drugim czynnikiem mającym duży wpływ na pracę na morzu są dążenia armatorów do wydłużenia czasu przebywania członków załogi na statku.
Stopnie autonomii
Obecnie na statkach są instalowane układy automatyki oraz układy wspomagania decyzji. Pozwala to na pracę bezwachtową siłowi przez określony czas podczas gdy ale na statku jest pełna załoga, która w razie potrzeby może przejąć sterowanie jednostką.
Międzynarodowa Organizacja Morska (IMO) klasyfikuje takie statki do pierwszej kategorii autonomii. Druga kategoria autonomii dotyczy zdalnie sterowanych statków z obsługą która może przejąć sterowanie funkcjami i systemami statku. Statki z trzecią kategorią są zdalnie sterowane i na burcie nie ma członków załogi. Statki na których wszystkie decyzje są inicjowane przez komputerowe układy automatyki zainstalowane na statku są klasyfikowane jako czwarta kategoria autonomii.
System Autonomicznej Nawigacji (SAN)
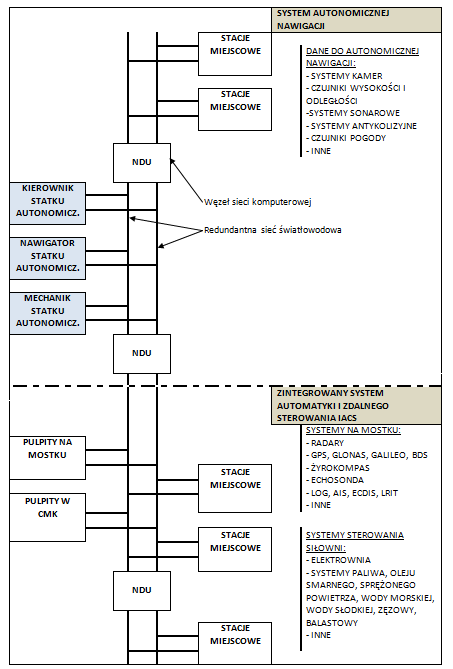
Aby zwiększyć bezpieczeństwo żeglugi i zmniejszyć niedogodności związane z problemami związanymi z czynnikiem ludzkim opisane powyżej proponuję zainstalowanie na statkach dodatkowego Systemu Autonomicznej Nawigacji (SAN) na istniejących lub nowo budowanych statkach z bezwachtową obsługą siłowni. System taki składał się będzie z komputerowych układów sterowania, bezpieczeństwa i monitoringu nazywanych ‘Inteligentny Nawigator’, ‘Inteligentny Mechanik’, ‘Manager Statku Autonomicznego’ oraz ‘Stacji Miejscowych’ (FS) z podłączonymi do nich specyficznymi dla statków autonomicznych układami i czujnikami.
Aby zapewnić niezawodność i sprawne funkcjonowanie Systemu Autonomicznej Nawigacji sprzęt komputerowy będzie potrójnie redundantny z możliwością jego naprawy i testowania podczas pracy a niepracujące zespoły będą w gorącej rezerwie. Elementy i czujniki systemu będą redundantne i będą posiadały funkcje samo-kontrolne z wykrywaniem i izolacją awaryjnych podzespołów.
Komponenty Systemu Autonomicznej Nawigacji będą połączone redundantną siecią światłowodową przez ‘Węzły Sieci Komputerowej’ (NDU). Do ‘Stacji Miejscowych (FS)’ Systemu Autonomicznej Nawigacji będą podłączone specyficzne urządzenia dla statku autonomicznego np.:
- Kamery komputerowego systemu obrazowania otoczenia z wykrywaniem zagrożeń,
- sonarowe czujniki stanu morza, wysokości fal oraz wykrywania przeszkód na i pod wodą,
- układy kontroli położenia jednostki z uwzględnieniem falowania przód/tył (Surge), odchylenie w bok (Sway) przechyły wzdłużne (Pitch), przechyły poprzeczne (Roll), falowanie góra/dół (Heave),
- systemy zapobiegania kolizjom na morzu z określeniem odległości do innych statków i obiektów wyposażone w redundantne kamery podczerwieni i obrazowania w ciemności itp.
Do Systemu Autonomicznej Nawigacji przez redundantną sieć światłowodową oraz dedykowane interfejsy będą podłączone również instalowane na statkach standardowe systemy:
- sterowania, kontroli i monitoringu na mostku takie jak odbiorniki światowego systemu określania pozycji GPS, GLONAS, Galileo, BDS, Echosonda, Radary, Urządzenia do pomiaru prędkości i przebytej drogi Log, system automatycznej identyfikacji AIS, Żyrokompas, System obrazowania map elektronicznych i informacji ECDIS, System dalekosiężnej identyfikacji i śledzenia statków system LRIT i inne;
- zintegrowane systemy automatyki i sterowania urządzeń siłowni.
Koncepcja układu automatyki statku wyposażonego w System Autonomicznej Nawigacji jest przedstawiona na Rys. 1 poniżej.
System
Autonomicznej Nawigacji pozwoli nie tylko zwiększyć bezpieczeństwo
żeglugi przez pomoc przy podejmowaniu decyzji, ale mógłby również stać
się przyczynkiem do możliwości sterowania statkiem w określonych
rejonach żeglugi przez komputerowe systemy ‘Inteligentnego Nawigatora’,
‘Inteligentnego Mechanika’ oraz ‘Managera Statku Autonomicznego’ bez
wachty na mostku i w siłowni. Tego typu, ograniczona autonomiczna praca
statku wymaga jednak dostosowania wymagań i przepisów IMO i
administracji morskich.
Zdaniem autora armatorzy statków chętnie
wyposażą swoje jednostki w System Autonomicznej Nawigacji jeżeli będzie
on produkowany seryjnie i jego koszt będzie racjonalny.
Rozwój statków autonomicznych
Obecnie
rozwój statków autonomiczny nie jest skoordynowany. Trwają prace przy
uruchomieniu autonomicznego trimaranu Mayflower o długości całkowitej
32,5 metra, opracowaniu rezultatów prób zdalnie sterowanego 28 metrowego
holownika (132 dwt), wdrażaniu projektu autonomicznego statku żeglugi
przybrzeżnej o nośności 3200 ton i pojemności 120 TEU Yara Birkeland,
opracowaniu rezultatów prób żeglugi autonomicznej miedzy portami w
Chinach i Japonii przez NYK Line samochodowiec Iris Leader o pojemności
brutto 70 826 który był sterowany przez autonomiczny system nawigacji
SSR. Takich projektów realizowanych w Europie i na świecie jest więcej.
Naturalnym
sposobem na skoordynowanie rozwoju statków autonomicznych byłoby
wdrożenie międzynarodowego prawa dotyczącego wymagań technicznych oraz
ubezpieczania statków i przewożonych przez nie ładunków. Międzynarodowa
Organizacja Morska IMO mogłaby wdrożyć wymagania dla statków
autonomicznych przez dodanie nowego rozdziału w Konwencji SOLAS. W
obecnej chwili głownie towarzystwa klasyfikacyjne pracują nad
określeniem wymagań dotyczących statków autonomicznych.
Statki okresowo autonomiczne
Analiza
kosztów i korzyści z eksploatacji statków autonomicznych wykazuje
największe oszczędności z rejsów bezzałogowych podczas długich rejsów
oceanicznych. Przepłynięcie bez załogi Oceanu Atlantyckiego, Spokojnego
czy Indyjskiego pozwoliło by na duże oszczędności na kosztach załogi.
Należy również mieć na uwadze trudne i ryzykowne warunki żeglugi
autonomicznej na małych obszarach, np. na Morzu Bałtyckim.
Zdaniem
autora należy rozważyć budowę i eksploatację Statków okresowo
autonomicznych z pełną autonomią podczas rejsów oceanicznych. Statki
takie po przepłynięciu oceanu dopływałyby do ‘Centrum pilotażu’ gdzie na
statek by mustrowała załoga z pilotem. Statek taki wpływałby do portu
jak zautomatyzowana jednostka. W porcie lub na redzie były by również
przeprowadzane prace serwisowe, konserwacyjne oraz by były uzupełniane
media jak paliwo, oleje, woda itp. Eksploatacja Statków okresowo
autonomicznych pozwalałaby w pełni wykorzystać potencjał wyszkolonych
załóg statków przy wpłynięciu statku do portu i pracach wy i
załadunkowych. Pozwoliłoby to również ograniczyć długie przeloty
członków załogi w celu zamustrowania na statku i ograniczyłoby ich
długie rozłąki z rodziną.
System informatyczny Statków okresowo
autonomicznych byłby zbudowany zgodnie z koncepcją architektury
rozproszonej Internetu Rzeczy IoT (Internet of Things) i dane byłyby
przetwarzane blisko źródeł sygnałów na obrzeżu sieci (Edge computing).
Decyzje podczas podróży oceanicznych byłyby podejmowane bezpośrednio na
Statku okresowo autonomicznym przez systemy komputerowe i jeżeli byłaby
dostępna łączność to statki by mogły być sterowane i kontrolowane z
Centrum sterowania na lądzie.
Wyzwania dla IMO, administracji morskich i przemysłu
W
dobie koronawirusa Międzynarodowa Organizacja Morska IMO powinna
położyć duży nacisk na sprawne opracowanie wymagań dotyczących statków
autonomicznych i ogłoszenie tych wymagań w oddzielnej części Konwencji
SOLAS. Prace te mogłyby być prowadzone zdalnie przy pomocy środków
elektronicznych, bez konieczności odbywania drogich podróży do Londynu.
Również należałoby skrócić system ratyfikacji nowych wymagań tak jak
tylko jest to możliwe.
Zdaniem autora przemysł jest zaangażowany w rozwój statków autonomicznych, ale bez jasno określonych wymagań technicznych prace te są niewystarczająco efektywne.
Dodatkowo
należałoby rozważyć zwiększenie finansowania na projektowanie, budowę i
uruchamianie statków autonomicznych.
Dobrym krokiem w tym kierunku
byłaby częściowa autonomia już istniejących statków przez zainstalowanie
na nich Systemów Autonomicznej Nawigacji oraz budowa i eksploatacja
Statków okresowo autonomicznych opisanych wyżej, z pełną autonomią
podczas podróży oceanicznych bez autonomicznego cumowania oraz za i
wyładunku w porcie.
Henryk Pepliński
Konsultant d.s. Systemów Elektrycznych i Automatyki na statkach i jednostkach offshore
Artykuł
powstał w ramach promocji książki autora ‘Automatyka statków i
jednostek offshore’ wydanej we grudniu 2020 przez wydanej Fundację
Promocji Przemysłu Okrętowego i Gospodarki Morskiej i dostępnej
Wersja książki w języku angielskim wydana przez Elsevier (USA) jest dostępna
https://www.elsevier.com/books/ship-and-mobile-offshore-unit-automation/peplinski/978-0-12-818723-4


 Grupa Przemysłowa Baltic: ruszyło cięcie blach na budowę bloków statku wycieczkowego
Grupa Przemysłowa Baltic: ruszyło cięcie blach na budowę bloków statku wycieczkowego
 Trwają kluczowe prace przy budowie terminalu FSRU w Zatoce Gdańskiej. Palowanie jakiego nie było
Trwają kluczowe prace przy budowie terminalu FSRU w Zatoce Gdańskiej. Palowanie jakiego nie było
 Firma STAL Complex Sp. z o.o. przekazała kolejną jednostkę dla ScaleAQ. Spółka zamyka ważny etap swojej historii i otwiera nowy rozdział
Firma STAL Complex Sp. z o.o. przekazała kolejną jednostkę dla ScaleAQ. Spółka zamyka ważny etap swojej historii i otwiera nowy rozdział
 Wielka awantura wokół duńskiej stoczni. Powód - przeglądy rosyjskich jednostek
Wielka awantura wokół duńskiej stoczni. Powód - przeglądy rosyjskich jednostek
 Groźny wyciek z kontenera w Antwerpii. 155 osób w szpitalu, masowa ewakuacja
Groźny wyciek z kontenera w Antwerpii. 155 osób w szpitalu, masowa ewakuacja
 FRS Windcat odebrał nowy statek z kadłubem z Polski
FRS Windcat odebrał nowy statek z kadłubem z Polski
 Polscy naukowcy stworzą cyfrowego bliźniaka Bałtyku
Polscy naukowcy stworzą cyfrowego bliźniaka Bałtyku
 11
Gdańska Giełda Zboża ponownie połączyła najważniejszych przedstawicieli branży
11
Gdańska Giełda Zboża ponownie połączyła najważniejszych przedstawicieli branży
 00:01:40
Pakistan buduje pierwszy od ponad 40 lat statek handlowy
00:01:40
Pakistan buduje pierwszy od ponad 40 lat statek handlowy
 Saronic zbuduje w Teksasie jedną z największych stoczni dla autonomicznych jednostek na świecie
Saronic zbuduje w Teksasie jedną z największych stoczni dla autonomicznych jednostek na świecie
 DNV przyznało certyfikat dla VentoFoil. To przyspieszy wdrażanie napędu wiatrowego
DNV przyznało certyfikat dla VentoFoil. To przyspieszy wdrażanie napędu wiatrowego
 Wiceminister Marchewka: Takiego statku jeszcze w Polsce nie było
Wiceminister Marchewka: Takiego statku jeszcze w Polsce nie było
 Załoga zajętego przez Iran tankowca została skazana na 22 lata więzienia
Załoga zajętego przez Iran tankowca została skazana na 22 lata więzienia
 Zagłosuj online. Wybieramy laureata nagrody Latarnie Gospodarki Morskiej 2025 w kategorii "Lider Technologii Morskich"
Zagłosuj online. Wybieramy laureata nagrody Latarnie Gospodarki Morskiej 2025 w kategorii "Lider Technologii Morskich"
 Szwedzi czekają na polskie promy. W porcie Ystad rosną obawy o finanse i przyszłość wspólnego projektu
Szwedzi czekają na polskie promy. W porcie Ystad rosną obawy o finanse i przyszłość wspólnego projektu
 Tego w polskiej stoczni nie było od lat. Wodowanie niszczyciela min, przyszłego ORP Jaskółka
Tego w polskiej stoczni nie było od lat. Wodowanie niszczyciela min, przyszłego ORP Jaskółka
 Zagłosuj online. Wybieramy laureata nagrody Latarnie Gospodarki Morskiej 2024 w kategorii "Lider Technologii Morskich"
Zagłosuj online. Wybieramy laureata nagrody Latarnie Gospodarki Morskiej 2024 w kategorii "Lider Technologii Morskich"
 00:01:41
Statek-widmo zatonął u wybrzeży Korei Płd.
00:01:41
Statek-widmo zatonął u wybrzeży Korei Płd.
 Już ponad połowa dużych tankowców ma skrubery
Już ponad połowa dużych tankowców ma skrubery
 Największy żaglowiec pasażerski na świecie bije rekord prędkości
Największy żaglowiec pasażerski na świecie bije rekord prędkości
Gdańska Giełda Zboża ponownie połączyła najważniejszych przedstawicieli branży
FRS Windcat odebrał nowy statek z kadłubem z Polski
Rośnie potencjał podażowy LNG. Inwestycje na rynku amerykańskim ustabilizują rynek [ANALIZA]
Na masowcach marynarze pracują bezpieczniej. Statki jednak wciąż toną i są przedmiotem zbrojnych ataków
TT-Line zamówiło kolejny prom nowej generacji
Oświadczenie prezesa PŻB S.A. w sprawie przedstawionych mu zarzutów


![Rośnie potencjał podażowy LNG. Inwestycje na rynku amerykańskim ustabilizują rynek [ANALIZA]](/files/multimedias/586/thumb141x86_Depositphotos_75580133_L.jpg)








![[WIDEO] PKP PLK podpisały umowę na budowę czwartego toru do Pruszcza. Skorzysta Port Gdańsk](/files/multimedias/40063/thumb141x86_Obrazek_14.jpeg)