Zespół badawczy pod kierownictwem prof. Tadeusza Szelangiewicza z Katedry Oceanotechniki i Budowy Okrętów AMS przeprowadził w grudniu na Jeziorze Głębokie próby działania całego systemu komputerowego i wyposażenia pomiarowo-nawigacyjnego zainstalowanego w modelu statku autonomicznego. Testowany był sprzęt oraz łączność ze stacją lądową.
Przeprowadzono próby i zarejestrowano obrazy z kamer oraz lidarów, sprawdzono parametry z anten GNSS i kompasu w czasie rzeczywistym. Jak deklaruje prof. Tadeusz Szelangiewicz: – Wszystkie systemy i urządzenia działają bardzo dobrze, a w oparciu o nowe doświadczenia będziemy wprowadzać modyfikacje i jeszcze lepsze rozwiązania (chodzi głównie o szerokopasmową transmisję danych np. obrazu na duże odległości). Dalsze prace to doskonalenie programu do autonomicznego sterowania i kolejne próby – dodaje.
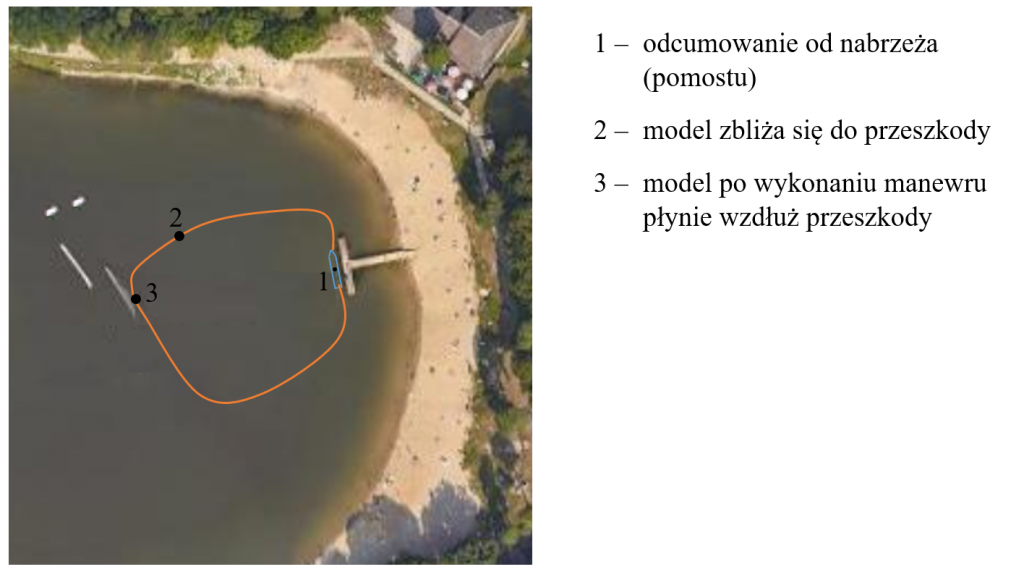
Najnowsze testy modelu bezzałogowego statku transportowego potwierdziły, że zastosowany układ napędowy (dwa rufowe pędniki azymutalne i dwa dziobowe stery strumieniowe) ma doskonałe właściwości manewrowe, które będą niezbędne na rzeczywistym autonomicznym statku.
Na akwenie otwartym potwierdzono, że zainstalowany system z kompletnym wyposażeniem w czujniki pomiarowe i urządzenia nawigacyjne pozwala na realizowanie wszystkich funkcji podczas autonomicznego sterowania.

Na rzeczywistym statku będą zainstalowane okrętowe urządzenia
pomiarowe i nawigacyjne w wykonaniu morskim. Zastosowane w modelu statku
urządzenia charakteryzują się identycznymi funkcjonalnościami jak te
stosowane w żegludze.
Przeprowadzone testy dotyczyły głównie
sprzętu zainstalowanego w modelu statku, interpretacji mierzonych
parametrów oraz transmisji ich i rejestracji w stacji lądowej (GSC). Nie
badano szczegółowo samego oprogramowania do autonomicznego sterowania
modelem – takie testy będą prowadzone w następnym etapie badań
eksperymentalnych.
Testy odbyły się na akwenie otwartym przy spokojnej pogodzie, czyli bez falowania i silnego wiatru.
-
Takie badania mają wymiar nie tylko naukowy i rozwojowy w kontekście
opracowywania nowej, autorskiej technologii, dla nas to też przygoda – deklaruje prof. Szelangiewicz.
Prototypowy
model autonomicznego statku powstał w Katedrze Oceanotechniki i Budowy
Okrętów. Model statku ma 3,15 m długości, 0,46 m szerokości, 0,17 m
zanurzenia.
Opracowywany komputerowy system sterowania
autonomicznego, w trakcie realizowanego przez model statku zadania (np.
rejs po zadanej trasie i wykonywanie manewru antykolizyjnego) musi
otrzymywać niezbędne informacje dotyczące nie tylko parametrów ruchu
statku (pozycja, prędkość, kurs), ale także informacje lub ostrzeżenia o
pojawiającej się przeszkodzie stałej lub ruchomej (inny, pływający
statek).
Model statku bezzałogowego został wyposażony w
następujące urządzenia pomiarowe i nawigacyjne, podłączone do kart I/O
systemu komputerowego:
• lidary pracujące w zakresie 360˚ (dziobowy i rufowy),
• odbiorniki GNSS (dziobowy i rufowy),
• kompas elektroniczny,
• kamery HD (dziobowa i rufowa).
Szczególne
podziękowania należą się Miastu Szczecin oraz obsłudze kąpieliska
Głębokie – za udostępnienie komfortowego miejsca do testów oraz wsparcie
podczas ich prowadzenia.



 Ostatni rejs Franka. Statek ZSM w Darłowie przeszedł na emeryturę
Ostatni rejs Franka. Statek ZSM w Darłowie przeszedł na emeryturę
 Prawie 2,7 tys. kandydatów chce studiować na Politechnice Morskiej w Szczecinie
Prawie 2,7 tys. kandydatów chce studiować na Politechnice Morskiej w Szczecinie
 Instytut Oceanologii PAN i Politechnika Morska w Szczecinie podpisały porozumienie o współpracy
Instytut Oceanologii PAN i Politechnika Morska w Szczecinie podpisały porozumienie o współpracy
 Wrak holenderskiego okrętu podwodnego odkryty nieopodal australijskiego wybrzeża
Wrak holenderskiego okrętu podwodnego odkryty nieopodal australijskiego wybrzeża
 00:01:18
Był jednym z najdziwniejszych statków badawczych na świecie. Po 60 latach trafi na złom
00:01:18
Był jednym z najdziwniejszych statków badawczych na świecie. Po 60 latach trafi na złom
 Budzące grozę odkrycie na terenie budowy przy Muzeum Marynarki Wojennej. Odnaleziono pochówek z czasów II wojny światowej
Budzące grozę odkrycie na terenie budowy przy Muzeum Marynarki Wojennej. Odnaleziono pochówek z czasów II wojny światowej
 Ile można zarobić na statku? Nawet 10 tys. euro miesięcznie
Ile można zarobić na statku? Nawet 10 tys. euro miesięcznie
 8
Narodowe Muzeum Morskie zdradza zawartość skrzynki z wraku XIX-wiecznego żaglowca. Były tam narzędzia cieśli okrętowego
8
Narodowe Muzeum Morskie zdradza zawartość skrzynki z wraku XIX-wiecznego żaglowca. Były tam narzędzia cieśli okrętowego
 00:01:39
Tak rozkłada się ciało w głębi oceanu (wideo)
00:01:39
Tak rozkłada się ciało w głębi oceanu (wideo)
 Pracowniczki platformy wiertniczej: Dziwne jest nie to, że tu jesteśmy, tylko to, że nas tu wcześniej nie było
Pracowniczki platformy wiertniczej: Dziwne jest nie to, że tu jesteśmy, tylko to, że nas tu wcześniej nie było
 Na „Titanicu” byli pasażerowie z Polski
Na „Titanicu” byli pasażerowie z Polski
 Zmarła Danuta Kobylińska-Walas – pierwsza w Polsce kobieta kapitan żeglugi wielkiej
Najdziwniejszy statek świata zostanie uratowany i nie trafi na złom? Jest nadzieja dla RP FLIP
Zmarła Danuta Kobylińska-Walas – pierwsza w Polsce kobieta kapitan żeglugi wielkiej
Najdziwniejszy statek świata zostanie uratowany i nie trafi na złom? Jest nadzieja dla RP FLIP
 Polscy marynarze podwodni szkolili się w Korei Południowej
Polscy marynarze podwodni szkolili się w Korei Południowej
 Chłopiec odkrył na plaży 275-letni wrak
Chłopiec odkrył na plaży 275-letni wrak
 ORP Sokół nie może wciąż "zakotwiczyć". Muzealne przedsięwzięcie stoi w miejscu
ORP Sokół nie może wciąż "zakotwiczyć". Muzealne przedsięwzięcie stoi w miejscu
 Ogromne lodowe kule nad Bałtykiem. Skąd się wzięły?
Ogromne lodowe kule nad Bałtykiem. Skąd się wzięły?
 00:03:05
Muzeum Marynarki Wojennej pokazuje wnętrze Sokoła. Prace nad wyjątkowym eksponatem wciąż trwają
00:03:05
Muzeum Marynarki Wojennej pokazuje wnętrze Sokoła. Prace nad wyjątkowym eksponatem wciąż trwają
 Antikythera. Starożytny wrak, nowe odkrycia
Antikythera. Starożytny wrak, nowe odkrycia
 00:02:48
14
Dar Młodzieży wypłynął w rejs do USA. To ostatnia taka podróż słynnego żaglowca
00:02:48
14
Dar Młodzieży wypłynął w rejs do USA. To ostatnia taka podróż słynnego żaglowca
Instytut Oceanologii PAN i Politechnika Morska w Szczecinie podpisały porozumienie o współpracy
Prawie 2,7 tys. kandydatów chce studiować na Politechnice Morskiej w Szczecinie
Katastrofy morskie – czy można ich uniknąć? Wykład otwarty na Uniwersytecie Morskim w Gdyni
Start Kina Letniego Stogi przesunięty. Przyczyną warunki pogodowe
Dar Młodzieży w Nowym Jorku. Parada żaglowców i wyjątkowy jubileusz
Norwesko-polskie spotkanie przy byłym ORP Sokół. Okazja do wspomnień i rozmów o przyszłości