pc




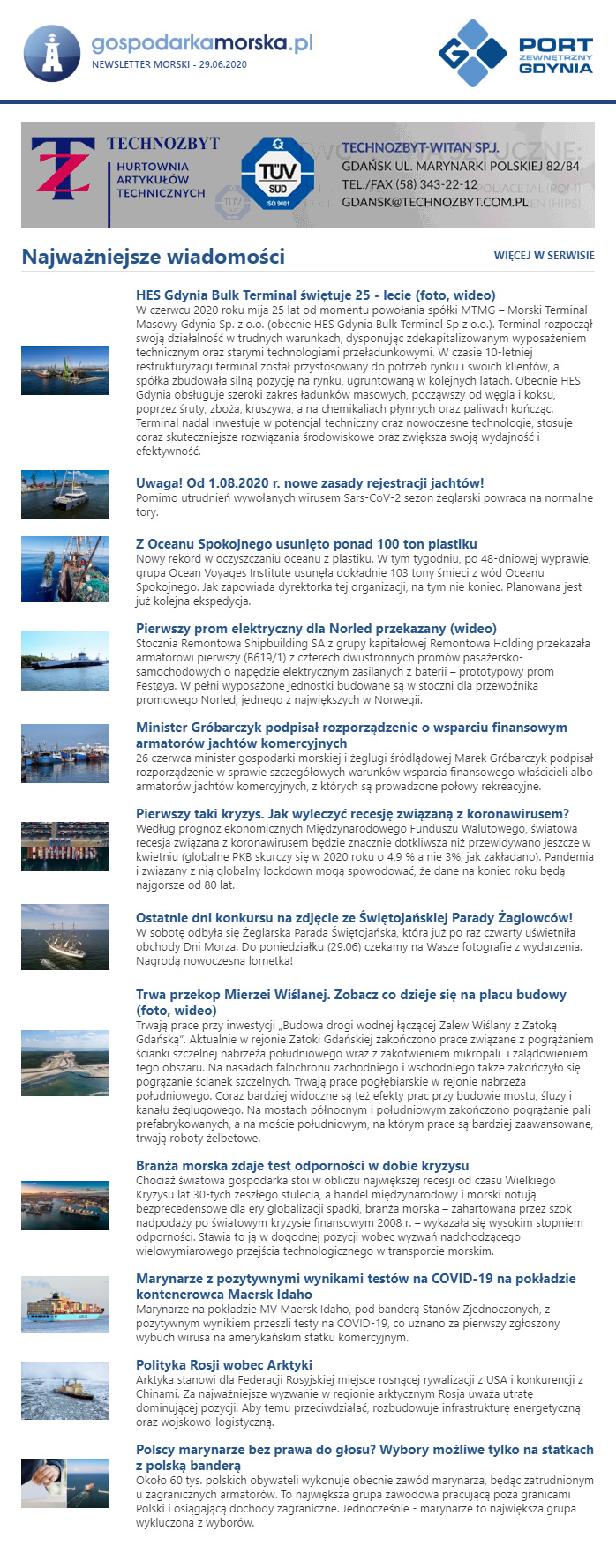
Studenci Politechniki Gdańskiej, Marcin Skibowski i Robert Przystalski, w ramach swojej pracy dyplomowej, zaprojektowali i wykonali prototyp podwodnego robota inspekcyjnego STIUART. Zdalnie sterowany pojazd posiada funkcję transmisji obrazu wideo, dzięki zainstalowanej w nim kamerze. Projekt zrealizowano dzięki wsparciu finansowemu przedsiębiorstwa Enamor i obejrzeć można go w ramach wystawy towarzyszącej Forum Gospodarki Morskiej w Gdyni.
Mobilny podwodny robot inspekcyjny, wykonany przez seminarzystów dr hab. Inż. Jarosława Guzińskiego, rozwiązuje problem automatyzacji inspekcji podwodnych instalacji elektroenergetycznych, kadłubów statków, ze szczególnym uwzględnieniem podwodnych części urządzeń napędowych i czujników pomiarowych zainstalowanych w kadłubie jednostki. Sterowanie robota odbywa się za pomocą komputera oraz dedykowanej aplikacji operatorskiej, pozwalającej na podgląd rzeczywistego obrazu z kamery w trybie online. Robot posiada szereg czujników przeznaczonych do diagnostyki hermetyczności poszczególnych części kadłuba.
STIUART pozwala na dokonywanie przeglądów podwodnych kabli przesyłowych HVDC, morskich farm wiatrowych, elementów hydrotechnicznych elektrowni pływowych, czy zbiorników elektrowni szczytowo-pompowych. Inspekcje tego typu wykonywane są okresowo ze względu na możliwość wystąpienia uszkodzeń trudnodostępnych części znajdujących poza dostępem obsługujących. Często sama inspekcja wiąże się również z ustalaniem skali występującego na kadłubie naturalnego porostu roślinno-zwierzęcego, jak również do oceny kondycji urządzeń zaburtowych. Obecnie wykorzystywani są do tego nurkowie, którzy dokonują przeglądów podczas postoju statków przy nabrzeżu. Stosowanie robotów podwodnych do przeglądów tego typu pozwala na zmniejszenie kosztów inspekcji oraz ogranicza niebezpieczeństwo pojawiające się podczas badania przyczyn i skutków kolizji morskich.
Rozmiar i masa całego zestawu, w skład którego wchodzą: robot, akumulator, bęben z kablem światłowodowym oraz ładowarka, pozwala na zabranie urządzenia na pokład samolotu, jako standardowy bagaż lotniczy. Wykonanie prototypu, który Marcin Skibowski i Robert Przystalski stworzyli w ramach swojej pracy dyplomowej, było możliwe dzięki wsparciu finansowemu przedsiębiorstwa Enamor, które w swojej działalności badawczo-rozwojowej współpracuje z Akademią Morską w Gdyni oraz Politechniką Gdańską.

 Zmiany w zwiedzaniu ORP Błyskawica
Zmiany w zwiedzaniu ORP Błyskawica
![Panie w gospodarce morskiej regionu Morza Bałtyckiego stanowią 43% [RAPORT]](/files/multimedias/38912/thumb141x86_Depositphotos_768401274_L.jpg) Panie w gospodarce morskiej regionu Morza Bałtyckiego stanowią 43% [RAPORT]
Panie w gospodarce morskiej regionu Morza Bałtyckiego stanowią 43% [RAPORT]
 Wrak holenderskiego okrętu podwodnego odkryty nieopodal australijskiego wybrzeża
Wrak holenderskiego okrętu podwodnego odkryty nieopodal australijskiego wybrzeża
 00:01:18
Był jednym z najdziwniejszych statków badawczych na świecie. Po 60 latach trafi na złom
00:01:18
Był jednym z najdziwniejszych statków badawczych na świecie. Po 60 latach trafi na złom
 Budzące grozę odkrycie na terenie budowy przy Muzeum Marynarki Wojennej. Odnaleziono pochówek z czasów II wojny światowej
Budzące grozę odkrycie na terenie budowy przy Muzeum Marynarki Wojennej. Odnaleziono pochówek z czasów II wojny światowej
 Ile można zarobić na statku? Nawet 10 tys. euro miesięcznie
Ile można zarobić na statku? Nawet 10 tys. euro miesięcznie
 8
Narodowe Muzeum Morskie zdradza zawartość skrzynki z wraku XIX-wiecznego żaglowca. Były tam narzędzia cieśli okrętowego
8
Narodowe Muzeum Morskie zdradza zawartość skrzynki z wraku XIX-wiecznego żaglowca. Były tam narzędzia cieśli okrętowego
 00:01:39
Tak rozkłada się ciało w głębi oceanu (wideo)
00:01:39
Tak rozkłada się ciało w głębi oceanu (wideo)
 Pracowniczki platformy wiertniczej: Dziwne jest nie to, że tu jesteśmy, tylko to, że nas tu wcześniej nie było
Pracowniczki platformy wiertniczej: Dziwne jest nie to, że tu jesteśmy, tylko to, że nas tu wcześniej nie było
 Na „Titanicu” byli pasażerowie z Polski
Na „Titanicu” byli pasażerowie z Polski
 Zmarła Danuta Kobylińska-Walas – pierwsza w Polsce kobieta kapitan żeglugi wielkiej
Najdziwniejszy statek świata zostanie uratowany i nie trafi na złom? Jest nadzieja dla RP FLIP
Zmarła Danuta Kobylińska-Walas – pierwsza w Polsce kobieta kapitan żeglugi wielkiej
Najdziwniejszy statek świata zostanie uratowany i nie trafi na złom? Jest nadzieja dla RP FLIP
 Polscy marynarze podwodni szkolili się w Korei Południowej
Polscy marynarze podwodni szkolili się w Korei Południowej
 Chłopiec odkrył na plaży 275-letni wrak
Chłopiec odkrył na plaży 275-letni wrak
 ORP Sokół nie może wciąż "zakotwiczyć". Muzealne przedsięwzięcie stoi w miejscu
ORP Sokół nie może wciąż "zakotwiczyć". Muzealne przedsięwzięcie stoi w miejscu
 Ogromne lodowe kule nad Bałtykiem. Skąd się wzięły?
Ogromne lodowe kule nad Bałtykiem. Skąd się wzięły?
 00:03:05
Muzeum Marynarki Wojennej pokazuje wnętrze Sokoła. Prace nad wyjątkowym eksponatem wciąż trwają
00:03:05
Muzeum Marynarki Wojennej pokazuje wnętrze Sokoła. Prace nad wyjątkowym eksponatem wciąż trwają
 Antikythera. Starożytny wrak, nowe odkrycia
Antikythera. Starożytny wrak, nowe odkrycia
 00:02:48
14
Dar Młodzieży wypłynął w rejs do USA. To ostatnia taka podróż słynnego żaglowca
00:02:48
14
Dar Młodzieży wypłynął w rejs do USA. To ostatnia taka podróż słynnego żaglowca
 00:01:35
Statek kosmiczny obcych czy nazistowski bunkier pod wodą? Dziwne odkrycie w głębinach Bałtyku
00:01:35
Statek kosmiczny obcych czy nazistowski bunkier pod wodą? Dziwne odkrycie w głębinach Bałtyku
Panie w gospodarce morskiej regionu Morza Bałtyckiego stanowią 43% [RAPORT]
„Kobiety z rdzy i żelaza”. Gdynia pokaże spektakl o robotniczkach portów i stoczni
Molestowanie seksualne na statku – były kapitan przyznał się
Statki, które opowiedziały Polskę światu. Wkrótce wystawa
Instytut Oceanologii PAN i Politechnika Morska w Szczecinie podpisały porozumienie o współpracy
Prawie 2,7 tys. kandydatów chce studiować na Politechnice Morskiej w Szczecinie
![Rosną greckie kadry na morzu i lądzie. Greccy armatorzy zatrudniają głównie greckich oficerów i marynarzy [RAPORT]](/files/multimedias/40607/thumb141x86_grecja.jpg)